13. gmapping ROS Package
gmapping ROS Package
Now that you’ve learned the Grid-based FastSLAM algorithm, let’s test its power by solving the SLAM problem in simulation. In this lab, you’ll implement a
gmapping
ROS package which is based on the Grid-based FastSLAM algorithm to map an environment.
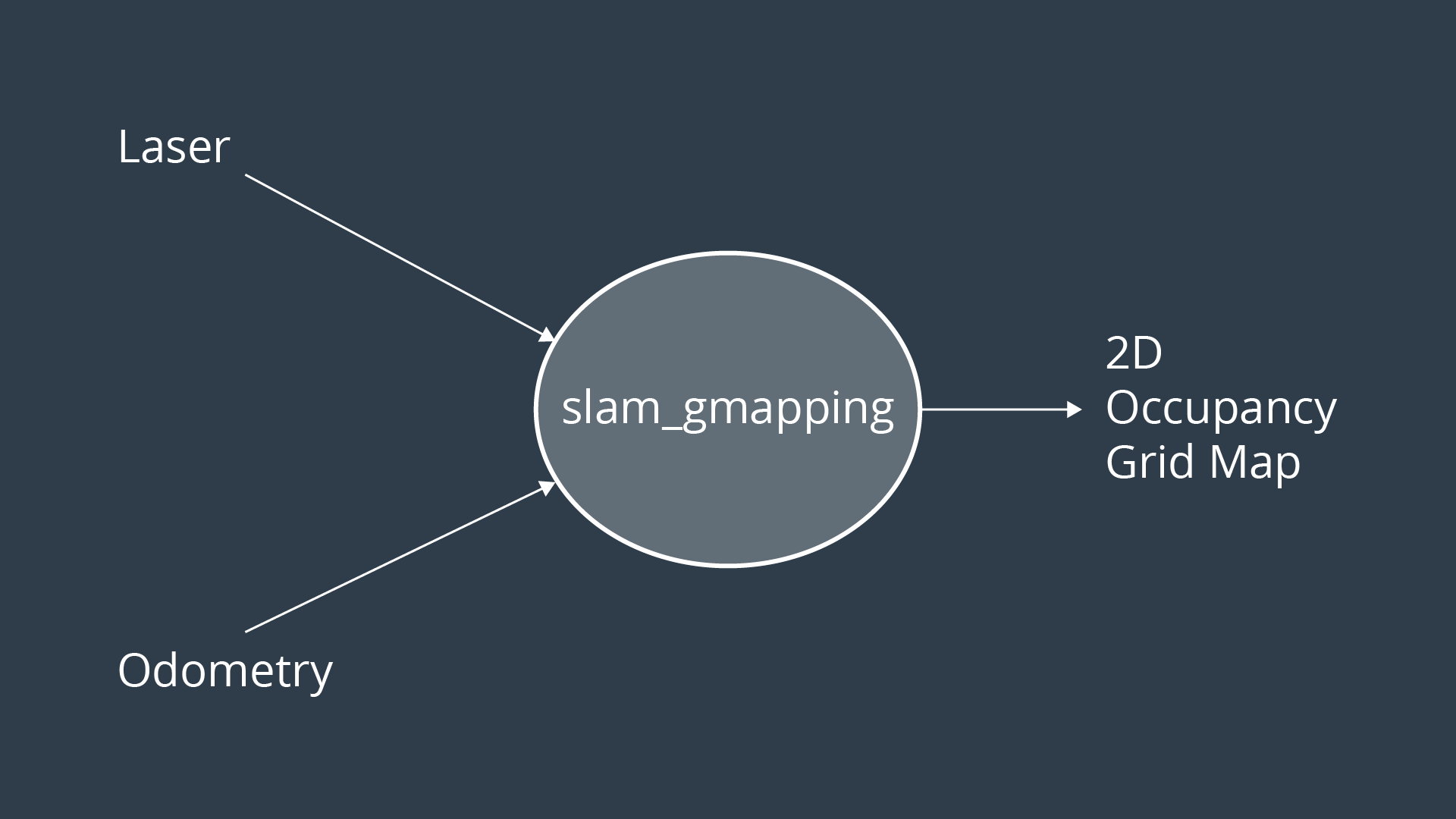
gmapping
provides laser based SLAM. Meaning that you can feed its node with the robot laser measurements and odometry values and expect it to provide you with a 2D occupancy grid map of the environment. The map will be updated as the robot moves and collect sensory information using its laser range finder sensor.
gmapping
package documentation
Access this
link
and go over the documentation of the
gmapping
ROS package
Deploying a Turltebot in a Willow Garage environment
You will be deploying a turtlebot in a willow garage environment inside the Udacity Workspace . Thus, navigate to the next concept, enable GPU, and GO TO DESKTOP.
Create a
catkin_ws
in
/home/workspace/
$ mkdir -p /home/workspace/catkin_ws/src
$ cd /home/workspace/catkin_ws/src
$ catkin_init_workspace
$ cd ..
$ catkin_makePerform a System Update/Upgrade
$ apt-get update
$ apt-get upgrade -y
Clone
turtlebot_gazebo
and
turtlebot_teleop
in src
$ cd src/
$ git clone https://github.com/turtlebot/turtlebot_simulator
$ git clone https://github.com/turtlebot/turtlebotInstall packages dependencies
The dependencies are already installed in the workspace but it's always good to check!
$ cd ..
$ source devel/setup.bash
$ rosdep -i install turtlebot_gazebo
$ rosdep -i install turtlebot_teleopBuild the packages
$ catkin_make
$ source devel/setup.bashDeploying a Turltebot in a Willow Garage environment
$ roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=worlds/willowgarage.world
Now, interface the
gmapping
package with your robot to perform SLAM!
SLAM with gmapping
Task Description:
Follow these tasks to map an environment with a Grid-based FastSLAM ROS package:
Task Feedback:
Great Work!